Data Structures
- Amortised analysis
- Stack ADT
- List ADT
- Queue ADT
- Dictionary ADT
- Priority queue ADT
- Disjoint Set ADT
- Binary Search Tree
- 2-3-4 tree
- Red Black Tree
- B-tree
- Hash-tables
- Binary heap
- Binomial heap
- Fibonacci heap
Amortised analysis
- Amortised analysis considers the average cost of a sequence of operations in a data structure.
- Aggregate analysis puts an upper bound on the total cost of n operations then states that the amortised cost is $T(n)/n$.
- If we have a sequence of operations with true cost $c_i$, if we can invent $c_i’$ such that $\sum c_i \leq \sum c_i’$, then these $c_i’$ are valid amortised costs.
- An alternative method to find amortised costs is the potential method:
- $\Phi$ is a function that maps possible states of the data structure to real numbers $\geq 0$
- $\Phi = 0$ for the empty data structure.
- $c’ = c + \Phi(S_{post}) - \Phi(S_{ante})$
- $\Phi$ should be chosen such that ‘normal’ operations, which build up the ‘mess’ in a data structure, lead to increasing $\Phi$. This builds up credit for the expensive operation that cleans that data structure.
- As in physics, the total change in potential between two states is path-independent. This can be used to prove that the potential method results in a valid amortised cost.
- For example, with a dynamic array we can use $\Phi = 2 \times (\text{num items}) - \text{capacity}$
- normal insert has true cost $O(1)$ and amortised cost $O(1)$
- doubling the array has true cost $O(n)$ but amortised cost $O(1)$, because $\Delta \Phi = 2-n$.
Stack ADT
LIFO data structure that only offers operations for the top item
ADT Stack {
boolean isEmpty();
void push(Item x);
Item pop(); // precondition: !isEmpty
Item top(); // precondition: !isEmpty
}
Commonly implemented using an array and a TOS (top-of-stack) index or linked list.
List ADT
ADT List {
boolean isEmpty();
Item head(); // precondition: !isEmpty
void prepend(Item x);
List tail(); // precondition: !isEmpty
void setTail(List newTail); // precondition: !isEmpty
}
Queue ADT
Similar to a stack, but is LIFO.
ADT Queue {
boolean isEmpty();
void push(Item x);
Item pop(); // precondition: !isEmpty
Item first(); // precondition: !isEmpty
}
A double-ended queue (deque) generalises the stack/queue to a data structure that allows insertions and extractions at the front or rear.
Dictionary ADT
ADT Dictionary {
void set(Key k, Value v);
Value get(Key k);
void delete(Key k);
}
- If they keys are drawn from a relatively small range of integers, we can use direct addressing where the keys are just indices into an array, in which the values would be stored.
- However, dictionaries are most often implemented as binary search trees.
Priority queue ADT
- Used to keep track of a dynamic set of objects whose keys support a total ordering.
- Like a FIFO queue, except each key corresponds to a priority – items with higher priority move to the top.
- Normally implemented as heaps.
ADT PriorityQueue {
void insert(Item x)
Item first();
Item popmin();
void decreasekey();
void delete(Item x);
}
Disjoint Set ADT
- Used to keep track of a dynamic collection of items in disjoint sets (e.g. Kruskal)
- Each set is referred to by a handle, e.g. a representative element from the set, or a hash ID. It doesn’t matter as long as it is stable.
ADT DisjointSet {
Handle get_set_with(Item x);
void add_singleton(Item x);
void merge(Handle x, Handle y);
}
Flat forest and deep forest
- In the flat forest implementation, items in a set are stored as a linked list, but they also point to the set’s handle.
get_set_withis $O(1)$.- to
mergewe just iterate through one set in $O(n)$ and update their pointers. - using the weighted union heuristic, we should keep track of the size of each set and always update the pointers on the smaller set.
- the aggregate cost of m operations, n of which are
add_singleton, is $O(m + n \lg n)$.
- Alternatively, to make
mergefaster, we can just build a deeper tree by attaching one tree to the other, i.e deep forest- although
mergebecomes $O(1)$,get_set_withneeds to walk up the tree to find the root. - using the union by rank heuristic, we should keep track of the rank of each root (height) and attach the shorter tree to the taller one.
- although
Lazy forest
- In order to get the best benefits of flat and deep trees, we defer cleanup in the style of the Fibonacci heap, using the path compression heuristic.
mergeis the same as in a deep forest: update the handle of the shorter tree to point to the handle of the taller tree.get_set_with(x)walks up the tree to find the root, then walks up again making x and all its parents point directly to the root.- The ranks are not updated during cleanup, thus they only represent an upper bound.
- It can be shown the the cost of m operations on n items is $\approx O(m)$.
Binary Search Tree
- Binary search trees (BSTs) are made of nodes that point to two sub-trees. The left sub-tree will be items smaller than the key of the node, right sub-tree will be larger items.
- The successor will be the left-most node in the right subtree (if that exists). Otherwise, walk up the tree until the link goes up-and-right.
- If a node has two children, its successor has no left child (otherwise there would be a smaller node).
- Most operations are $O(\lg n)$ if the tree is balanced, but balance cannot be guaranteed.
- Deletion:
- it is trivial to delete a leaf node or a node with one child
- to delete a node with two children, replace it with its successor (which must come from the right subtree), then delete, because the successor has no left child.
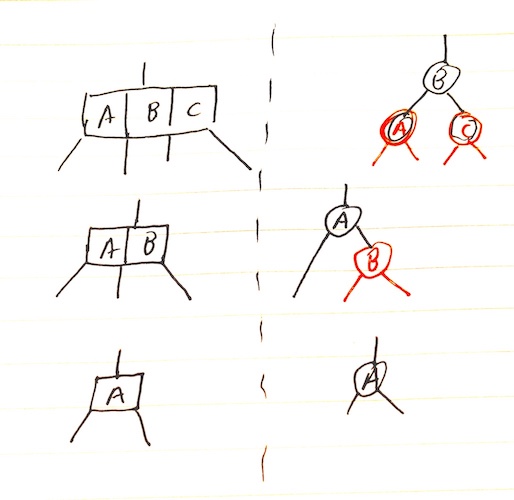
2-3-4 tree
- Similar to a BST, except each node can now have 2, 3, or 4 children (i.e 1, 2, 3 keys).
- A 2-3-4 tree is always balanced, so searching is bounded by $O(h)$.
- Always try to insert into the bottom layer: if you see any 4-nodes along the way, split them into two 2-nodes. Thus the tree can only increase in height if the root is a 4-node, in which case it is split into three 2-nodes.
Red Black Tree
An RBT is a BST that satisfies five invariants:
- Every node is either red or black
- The root is black
- All leaf nodes are black, and don’t contain data
- If a node is red, its children are both black.
- Any path from a given node to leaves contains the same number of black nodes.
Red black trees are isomorphic to 2-3-4 trees, but has the advantage that it is easier to code:
Operations that don’t modify the tree structure are the same as for BSTs. But in order to preserve the RBT invariants, other operations require rotations.
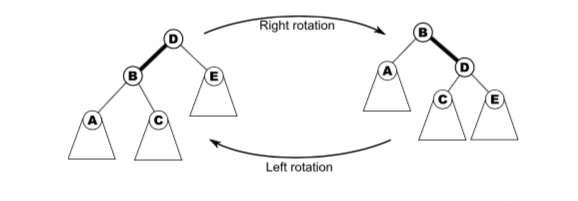
In the diagram above, D has been rotated to the right, then B has been rotated to the left. These rotations apply to non-root nodes as well.
To rotate a parent x right given its left child y:
if y != null:
x.l = y.r
y.r = x
x = y
Likewise, a left-rotation:
if y != null:
x.r = y.l
y.l = x
x = y
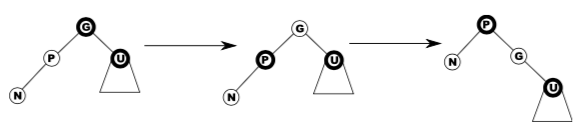
RBT Insertion
- Let p denote the parent, g the grandparent, u the uncle, and n the new node to be inserted.
- If p is black, we can just insert a red child directly.
- If p is red, we will insert a red n then clean up the tree. In this case, g must be black (because the tree cannot have two red nodes in a row).
Case 1 – red uncle
- Easy: flip colour of p, u, g.
- If g is a root, just recolour it black and finish.
- If g has a red parent, we have moved the problem up two levels.
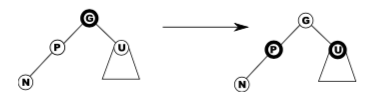
Case 2 – black uncle, bent
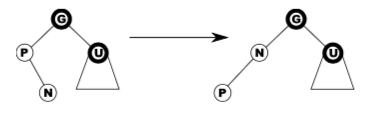
Left-rotate n and we are now in case 3.
Case 3 – black uncle, straight
- Swap colours of p and g, then right-rotate g.
B-tree
- B-trees are a generalisation of BSTs with a high branching factor, with the idea that children may actually be stored on a separate disc.
- Each node of a B-tree has a lower and upper bound on the number of keys it may contain (except the root has no lower bound).
- A B-tree is parameterised by a minimum degreee t such that each node will have between t and 2t pointers. A 2-3-4 tree is thus a B-tree of degree 2.
- Insertion is generalised from 2-3-4 trees: on the way down, whenever you find a full node, split it into two and move the median key up one level. Insertion can only happen in the bottom level.
B-tree deletion
- We can only delete a key from the bottom otherwise its children lose their separator. Hence we start by replacing the key with its successor like with BSTs.
- But we must prepare the tree first, because deleting might violate the minimum fullness requirement.
- Hence if deletion would cause the node to become too small, we refill a node, redistributing some keys from its siblings if they can afford to lose some, or merging.
- Merging siblings makes the parent lose a key, so we might have to recursively refill the parent.
def delete(k):
if k is in bottom node B:
if B cannot lose key:
refill(B)
delete k from B
else:
swap(k, successor(k))
# now k is in a bottom node
delete(k)
def refill(B):
"""
PRECONDITION: B has t-1 keys
POSTCONDITION: B has more than t-1 keys
"""
if either sibling can lose keys:
redistribute keys to B
else:
# B and all siblings have t-1 keys
merge B with a sibling
if B.parent has fewer than t-1 keys:
refill(B.parent)
Hash-tables
- A hash-table is a data structure that may be used to implement the dictionary ADT.
- Keys are mapped to an integer between 0 and $m-1$ with some hash function $h(k)$, and can then be stored at that index in an array of size m.
- If two keys map to the same location, there is a hash collision. This can be resolved by chaining or open-addressing
- Chaining is a simple solution:
- Each array location points to a linked list.
- With a good hash function, keys will be evenly distributed in the array.
- Worst case is $O(n)$ if all items hash to one bucket.
Open addressing
- $h(k)$ is the first preference for where to store a given key. If it is already full, we use some rule to probe the hash table for another position.
- We then follow this succession rule every time we query an item, checking for key equality.
- When an item is deleted, it should be marked as deleted rather than just removed – otherwise it interferes with the probing.
-
If insertion causes the occupancy to increase beyond a certain threshold, the size of the hash table should be increased (like with dynamic arrays).
- Linear probing simply finds the next available memory cell and inserts it there.
- return $h(k) + j \mod m$, where j is the number of attempts
- leads to primary clustering, in which failed attempts hit the same bucket and overflow to the same buckets, resulting in long runs of occupied buckets
- Quadratic probing is an improvement that increases the space between guesses:
- return $(h(k) + cj + dj^2) \mod m$
- doesn’t suffer from primary clustering, but suffers from secondary clustering in which two keys that hash to the same value lead to the same probing sequence.
- Double hashing suffers from neither primary nor secondary clustering:
- return $h_1(k) + j h_2(k) \mod m$ using different hash functions.
- thus keys that hash to the same value will have different probing sequences
- best open-addressing scheme in terms of collision reduction but has overhead of extra hash
Binary heap
- A heap is an almost full binary tree which satisfies the heap property, where each node has a value at least as large as those of its children. Thus the root node is the maximum element.
- The height of a binary heap is $\left \lfloor \lg n \right \rfloor$.
- Isomorphic to an array where
a[k] >= a[2k+1]anda[k] >= a[2k+2]. - Min-heaps can be used to implement the priority queue ADT, allowing for easy access of the highest priority item.
- All operations are bounded by $O(\lg n)$ except for merging, which can only be done in $O(n)$ by concatenating the two arrays and heapifying.
Binomial heap
- One problem with binary heaps is that they have an $O(n_1 + n_2)$ cost to merge (concatenate arrays then heapify).
- A binomial tree of order 0 is a single node (height 0).
- A binomial tree of order k is obtained by combining two binomial trees of order $k-1$.
- contains $2^k$ nodes
- height is always equal to order
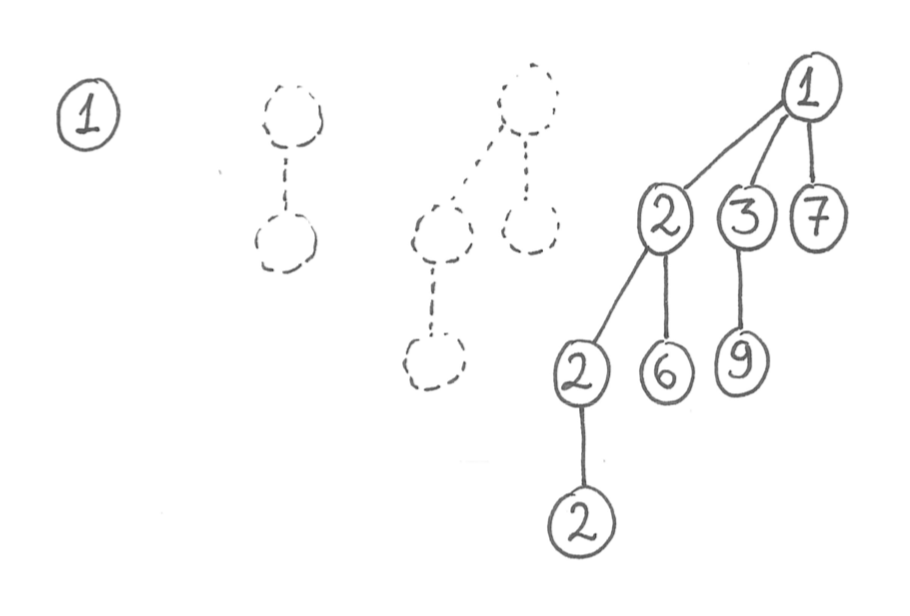
- A binomial heap is a forest of binomial trees, at most one of each order.
- if a heap contains n nodes, it contains $O(\lg n)$ binomial trees, the largest of which has order $O(\lg n)$.
- can be thought of as a binary number
firstis $O(\lg n)$ because we have to scan through the root of each binomial tree in the heap.- Merging is very similar to binary addition, and is thus $O(\lg (n_1 + n_2))$.
popminrequires $O(\lg n)$ to find the minimum. The children of this minimum are another binomial heap, so after deleting the minimum we can merge it with the rest in $O(\lg n)$.pushcan be viewed as merging a new binomial heap which only contains a tree of order 0. It is $O(1)$ amortised because most operations don’t touch many trees, but $O(\lg n)$ worst case.
Fibonacci heap
- Designed to make Dijkstra’s algorithm more practical by offering amortised $O(1)$
pushanddecreasekey. - Idea is to be lazy for these operations, only cleaning up when
popminis called. - Uses a list of heaps (pointers to roots), as well as a pointer to
minroot. pushcreates a new heap with one node, adds it to the list of heaps, and updatesminrootif necessary.popminrequires cleanup:- delete the
minrootnode, then promote its children to be roots - while there are two roots with the same degree, merge them.
- update
minroot
- delete the
def push(k, v):
h = new heap(k, v) # only one node
add h to rootlist
update minroot if k < minroot.key
def popmin():
min = copy(minroot)
for child in minroot.children:
clear child mark
add child to rootlist
delete minroot
cleanup()
minroot = minimum of rootlist
return min
def cleanup():
"""
To cleanup, we use an auxiliary array where the index corresponds
to the degree. If there is already a tree in an index, merge.
"""
root_array = [None, None, ...]
for tree t in roots:
x = t
while root_array[x.degree] is not None:
u = root_array[x.degree]
root_array[x.degree] = None
x = merge(x, u)
root_array[x.degree] = x
return [root for root in root_array if root is not None]
decreasekeyis slightly more complicated:- instead of just dumping heap violations into the list, we may also need to dump its parent. Otherwise the
minrootheap might be wide and shallow, leading to slowpopmin - if you lose one child, you get marked as a
losernode - if you lose two children, you get dumped into the root list and the mark is removed.
- instead of just dumping heap violations into the list, we may also need to dump its parent. Otherwise the
def decreasekey(v, new_key):
let n be the node containing v
n.key = new_key
if n violates heap condition:
repeat:
p = n.parent
remove n from p.children
insert n into rootlist, updaing minroot
n.loser = False
n = p
until p.loser == False
if p not in rootlist:
p.loser = True
Analysis using potentials
- We need $\Phi$ to increase for
pushanddecreasekeyto build up for the expensivepopmin, which does all the cleanup. Eachpushanddecreasekeyadds a root, whilepopminremoves thelosermark. Thus:
- Every
pushhas $\Delta \Phi = 1$, so the cost is $O(1)$ amortised. - For
decreasekey, the cost depends on whether the parents are losers etc, but the total amortised cost is still $O(1)$. - The cost of
popminwill depend on $d_{max}$, the upper bound on the degree of any node in the heap.- promoting the children of
minroothas true cost $O(d_{max})$, and the same amortised cost. - cleanup is $O(d_{max})$ as well.
- promoting the children of
Relationship to Fibonacci numbers
- As a consequence of the grandchild rule, if a node in a Fibonacci heap has d children, then that the subtree rooted at that node has more than $\geq F_{d+2}$, where F is a Fibonacci number.
- Consider a node x in the Fibonacci heap, with children $y_1, y_2, \ldots, y_d$ in the order which they became children of x.
- When x acquired $y_2$, it already had $y_1$, so $y_2$ must have had $\geq 1$ child for it to be merged. Likewise, $y_3$ must have had $\geq 2$ children, $y_d$ must have had $\geq d -1$ children.
- But
decreasekeycould have caused them to lose at most one child. - The total number of nodes is then bounded by:
- Where $N_0 \geq 0$, corresponding to either $y_1$ or $y_2$.
- Thus by definition of the Fibonacci numbers: